© William Sellers (2021)




News
New Controller
Technology
We've solved one of the big control problems we were having with our musculoskeletal models. The problem is that animals tend to have a very large number of muscles and that makes it tricky to decide which ones need to be activated to achieve a particular action. In this demonstration (shown at the ESHE Virtual Conference in September 2020) we demonstrate how we can control precise reach movements in a biologically realistic model. There is more to do but this is a very powerful technique that allows direct kinematic drive for things like locomotion which we could not do beforehand. This chimpanzee model is using the new controller to match a point on the hand with a point in space.Software and Data now
on GitHub
There are now a lot of different versions of GaitSym for various different projects so we have moved the source repository to GitHub. Hopefully that will make it a little easier for me to keep the versions up to date and release more bug fixes. The model data is in a variety of places. Some is on GitHub but there is also data on FigShare and also linked to our publications.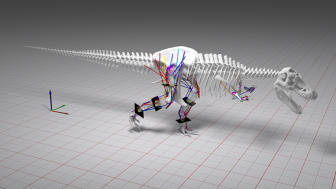
Tutorial Videos on
YouTube
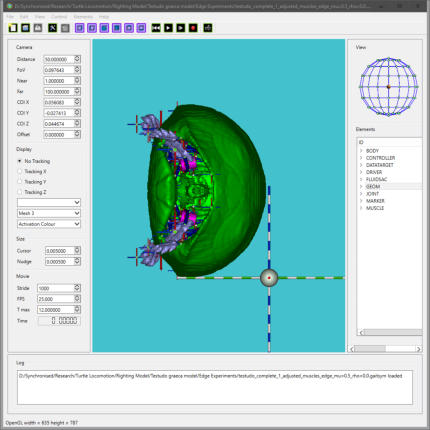
To support the switch to online teaching due to the pandemic we have put some turorial videos up on YouTube. As time permits we will put more up there since it seems like it works quite well especially because GaitSym2019 is much more interactive than previous versions. The focus of the videos is currently on calculating moment arms since that seems to be something that people want to do but you may have spotted that htis picture is a turtle on its side since that is what we are currently working on.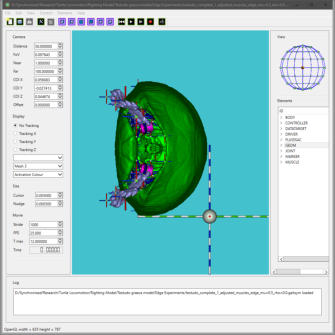











© William Sellers (2021)
News
New Controller Technology
We've solved one of the big control problems we were having with our musculoskeletal models. The problem is that animals tend to have a very large number of muscles and that makes it tricky to decide which ones need to be activated to achieve a particular action. In this demonstration (shown at the ESHE Virtual Conference in September 2020) we demonstrate how we can control precise reach movements in a biologically realistic model. There is more to do but this is a very powerful technique that allows direct kinematic drive for things like locomotion which we could not do beforehand. This chimpanzee model is using the new controller to match a point on the hand with a point in space.Software and Data now on
GitHub
There are now a lot of different versions of GaitSym for various different projects so we have moved the source repository to GitHub. Hopefully that will make it a little easier for me to keep the versions up to date and release more bug fixes. The model data is in a variety of places. Some is on GitHub but there is also data on FigShare and also linked to our publications.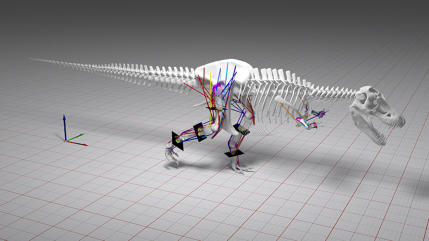
Tutorial Videos on
YouTube
To support the switch to online teaching due to the pandemic we have put some turorial videos up on YouTube. As time permits we will put more up there since it seems like it works quite well especially because GaitSym2019 is much more interactive than previous versions. The focus of the videos is currently on calculating moment arms since that seems to be something that people want to do but you may have spotted that htis picture is a turtle on its side since that is what we are currently working on.